オープンキャンパスで展示している展示パネルです.
斜めからの乗越えも補助する段差乗越え補助キャスタ
ちょっとした段差を,斜めからも真正面からも楽に乗り越えられる!
つくばチャレンジ
身体の捻りを操作に取り入れたサドル型身体動作インタフェース
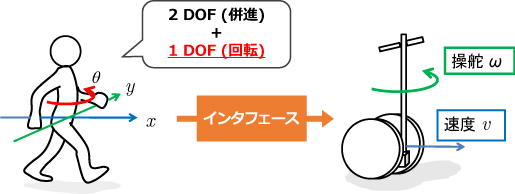 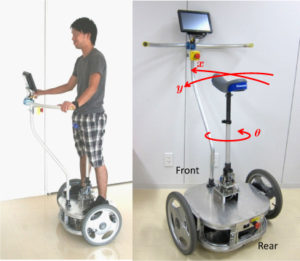 |

身体部位の姿勢角が進行方向へ変化するという人の運動特性(回転の1自由度:上図中のθ方向) を積極的にパーソナルモビリティの操作に活用することで,パーソナルモビリティのインタフェースを,さらに直観的または簡単な操作とする.人の回転の捻り動作を取得するために,ユニバーサルジョイントを介してサドルをパーソナルモビリティに設置した.基礎実験の結果からユーザビリティの高さを示すことができた. |
身体動作インタフェースによる電動車椅子の操作
|
|
 |
【目的】 人間動作分析の立場で,人間に共通する身体動作から,人間の操作意図を抽出し,人間機械系のヒューマンインタフェースとして利用するための方法論の確立
【方法】具体的な例題として電動車椅子のヒューマンインタフェースの開発を行っている.背もたれに設置した感圧センサが背もたれ部の身体動作を取得し,それを情報処理することにより,直感的でスムーズな運転を可能にする.
【成果】現在までに,システム構築と基礎実験が終了し,上半身のわずかな身体動作で車椅子が操作可能であることが確認できている.