学部4年生の望月さん,瀬沼さん,小池さんが 2023年3月4日に開催された電気学会次世代産業システム研究会(会場:拓殖大学文京キャンパス,関西学院大学梅田キャンパス,オンライン)にてそれぞれの研究テーマを発表しました.(望月さん:視覚支援,瀬沼さん:発話の音響情報による感情推定,小池さん:自律移動型パーティーションポール)




学部4年生の望月さん,瀬沼さん,小池さんが 2023年3月4日に開催された電気学会次世代産業システム研究会(会場:拓殖大学文京キャンパス,関西学院大学梅田キャンパス,オンライン)にてそれぞれの研究テーマを発表しました.(望月さん:視覚支援,瀬沼さん:発話の音響情報による感情推定,小池さん:自律移動型パーティーションポール)
第23回計測自動制御学会SI部門講演会SI2022で発表した内容について,B4川嵜さん,M1大木さんが優秀講演賞を受賞しました.
◆発表タイトル
川嵜さん:ハンズフリー松葉杖のための荷重感応型ロック関節の提案
大木さん:下肢力を利用した体幹の回旋を誘導する歩行促進装具のアシストトルクの検討

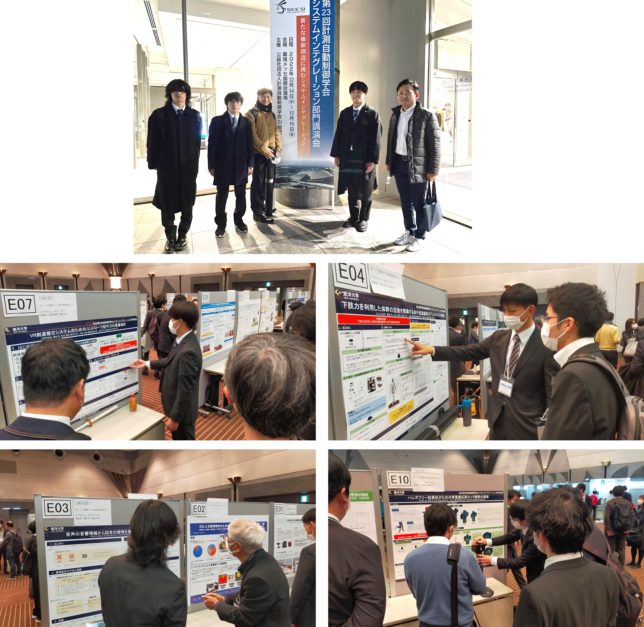
大木さん(M1),西郷さん(M1),川嵜さん(B4),瀬沼さん(B4)が,12月14日~16日に幕張メッセ国際会議場で開催された第23回計測自動制御学会システムインテグレーション部門講演会(SI2022)にて,それぞれの研究テーマを発表しました.(大木さん:歩行促進装具,西郷さん:VR剣道稽古システム,川嵜さん:ハンズフリー松葉杖,瀬沼さん:発話の音響情報による感情推定)
今年もつくばチャレンジに参加しました.残念ながら昨年の走行記録を更新することができませんでした.原因は,スタート時にサーバーとの通信が途絶えてしまいGNSSによる自己位置推定が正常に行えなかったことでした.
小梅:40m
今年も,つくチャレの活動に参加した皆さん,お疲れ様でした.応援に駆けつけてくれたOBの皆さんも有難うございました.
走行コースや他のチーム記録等は,公式ページから確認できます.

青木さん(M1)が,2022年10月17日~20日にベルギー・ブリュッセルで開催された国際会議The 48th Annual Conference of the IEEE Industrial Electronics Society The IECON 2022) で,運搬する荷重によらず操作性を一定に保つアシストカートに関する研究発表をしました.
Evanさん(M1)が7月28日~31日にオーストラリア・メルボルンで開催された国際会議 15th International Conference on Human System Interaction (HSI2022) にて,Robot-Assisted Language Learning (RALL)に関する研究を発表しました.