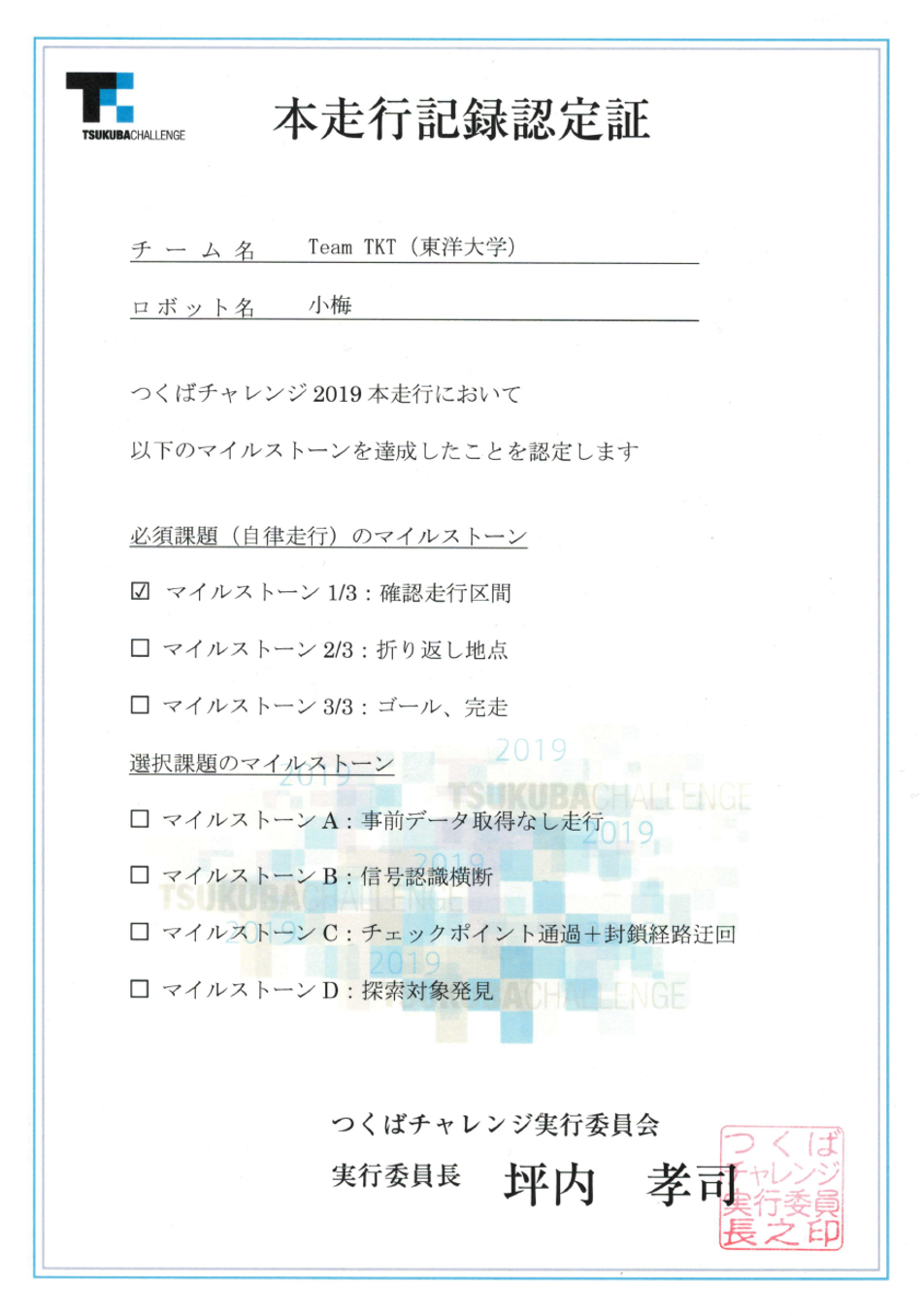
今年もつくばチャレンジに参加しました.残念ながら昨年の走行記録を更新することができませんでした.原因は,スタート時にサーバーとの通信が途絶えてしまいGNSSによる自己位置推定が正常に行えなかったことでした.
小梅:40m
今年も,つくチャレの活動に参加した皆さん,お疲れ様でした.応援に駆けつけてくれたOBの皆さんも有難うございました.
走行コースや他のチーム記録等は,公式ページから確認できます.

今年もつくばチャレンジに参加しました.残念ながら昨年の走行記録を更新することができませんでした.原因は,スタート時にサーバーとの通信が途絶えてしまいGNSSによる自己位置推定が正常に行えなかったことでした.
小梅:40m
今年も,つくチャレの活動に参加した皆さん,お疲れ様でした.応援に駆けつけてくれたOBの皆さんも有難うございました.
走行コースや他のチーム記録等は,公式ページから確認できます.
本走行の結果の自律走行の結果は次でした.
小梅:540m(信号機付き横断歩道)
タイタニック:(150m)
それぞれの前回の公式記録(小梅300m(2019年)),(タイタニック15m(2018年)よりも,大幅に記録を更新することができました!
つくチャレの活動に参加した皆さん,お疲れ様でした!OB/OGの皆さんも当日は,応援に駆けつけてくれて,ありがとうございました.
走行コース,他大学の記録などは,公式ページから確認できます.

今年は,3年ぶりに2台体制(ロボット名:Titanic(オレンジ色),小梅(紺色))でつくばチャレンジ2021にエントリーしています.TitanicがSLAMを主体に,小梅がGNSSを主体に自律走行アルゴリズムを実装しています.
本日,本研究室史上,最速かつ2台とも,確認走行(公道走行が許可されるための運転免許試験のようなものです.つくば市役所前250mを自律走行します.)を達成しました!!
本走行(11月21日)が楽しみです.
 #OB・OGの皆さん,見に来てくださいね.
#OB・OGの皆さん,見に来てくださいね.
つくばチャレンジ2020は,それぞれの参加チームで設定した課題について取り組む方式となりました.我々の研究室では,本学川越キャンパス内に障害物,停止線,段差,GNSSが受信できない箇所を含む全長約2㎞のコースを設定し自律走行を目指しました.結果は,途中1カ所で,ソフトウエアがフリーズし,完走はなりませんでした.しかし,フリーズ後システムを再スタートさせ,ゴール地点まで自律走行することができました.

つくばチャレンジ2019に1台のロボット(ロボット名:小梅)が参加しました.結果は,小梅が確認走行を達成し,信号の手前まで約500mを自律走行できました.(走行中にロボットに搭載していたディスプレイが倒れてしまい,それを直すためにロボットに手を触れたため,公式記録では,その時点までの走行距離300mくらいとなっています).昨年と比較すると倍以上の自律走行を達成でき,大きく進歩できたと思います.




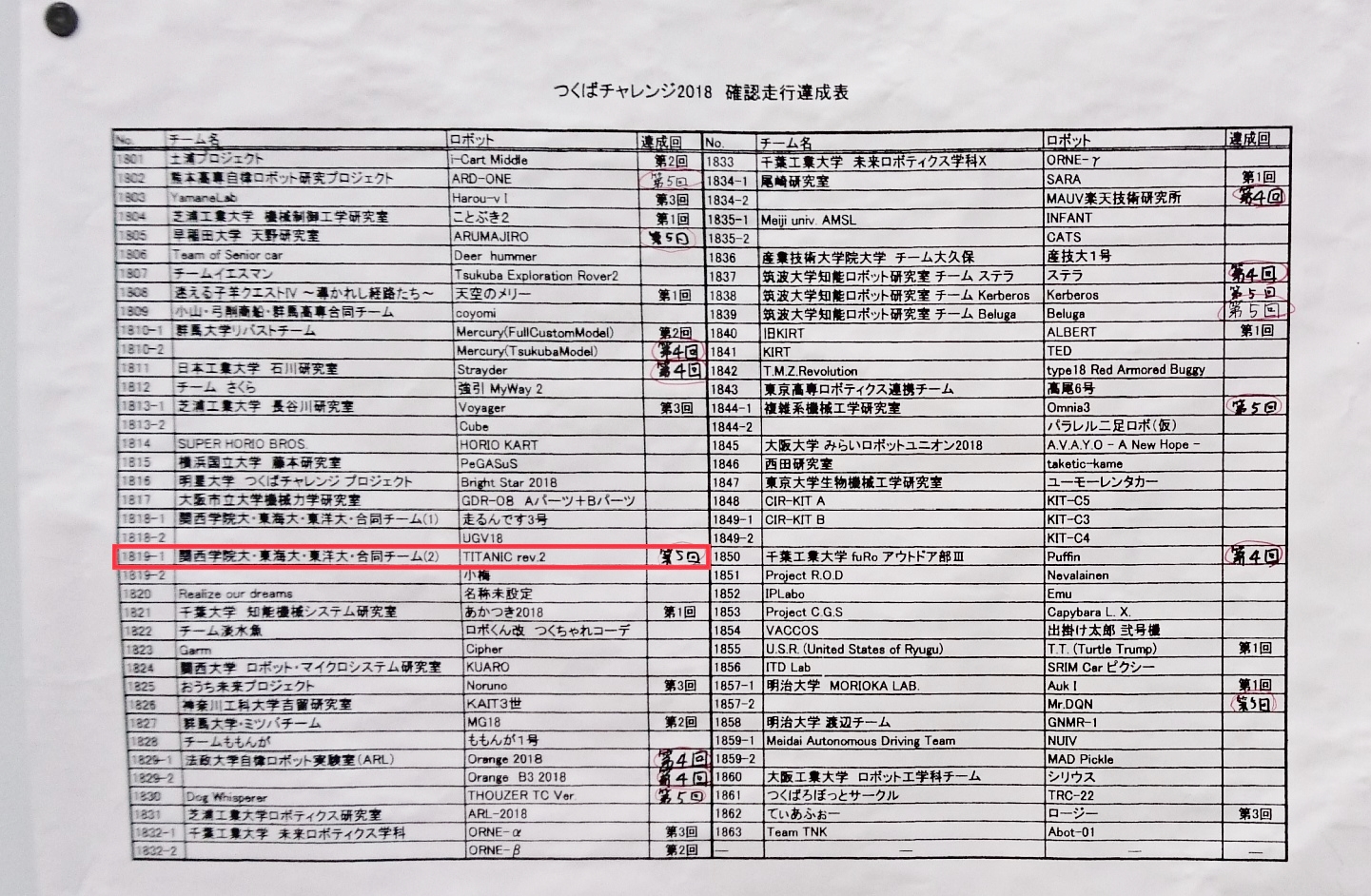
つくばチャレンジ2018に,本研究室から2台のロボット(小梅,Titanic rev.2 )が参加しました.結果は,小梅が確認走行ゴール10m手前でLiDARが感知できない障害物に阻まれ惜しくも走行距離230m,Titanic rev. 2は実験走行で確認走行を達成していましたが,本走行では,スタート地点の人垣の多さに自己位置推定が正確に機能せず,残念ながらスタートから15mの地点でリタイアとなりました.しかしながら,昨年とくらべ,大幅に記録を伸ばすことができ,大きく進歩できたと思います.とても充実した半年でした.





今年は,2台体制(TITANIC Rev. 2,小梅) でつくばチャレンジ2018にエントリーしています.実験走行では,TITANIC Rev. 2 が,3DLidar 1台とエンコーダで初の確認走行(公道・公園を走行するための条件,250mの自律走行)を達成しました.小梅は,GNSS RTKとIMUを用いて自律走行を達成しました.本走行が楽しみです.